RL, especially DRL (Deep Reinforcement Learning) has been an fervent research area during these years. One of the most famous RL work would be AlphaGo, who has beat Lee Sedol, one of the best players at Go, last year. And in this year (2017), AlphaGo won three games with Ke Jie, the world No.1 ranked player. Not only in Go, AI has defeated best human play in many games, which illustrates the powerful of the combination of Deep Learning and Reinfocement Learning. However, despite AI plays better games than human, AI takes more time, data and energy to train which cannot be said to be very intelligent. Still, there are numerous unexplored and unsolved problems in RL research, that's also why we want to learn RL.
This is the first note of David Silver's RL course.
- About Reinforcement Learning
- The Reinforcement Learning Problem
- Inside An RL Agent
- Problems within Reinforcement Learning
About Reinforcement Learning
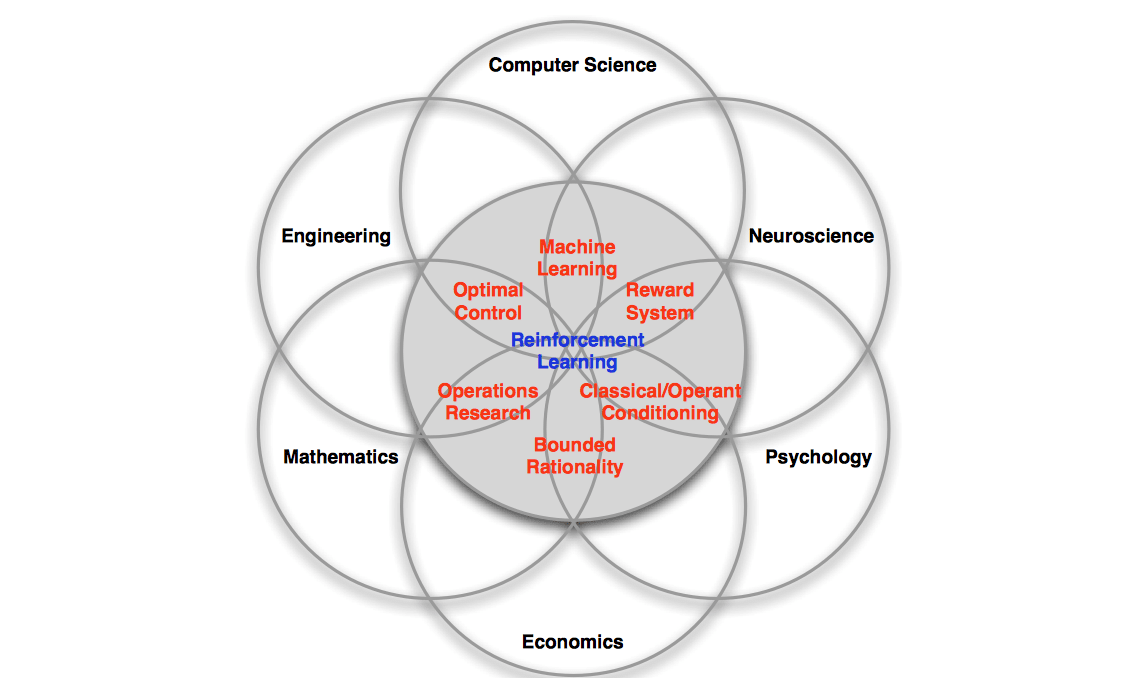
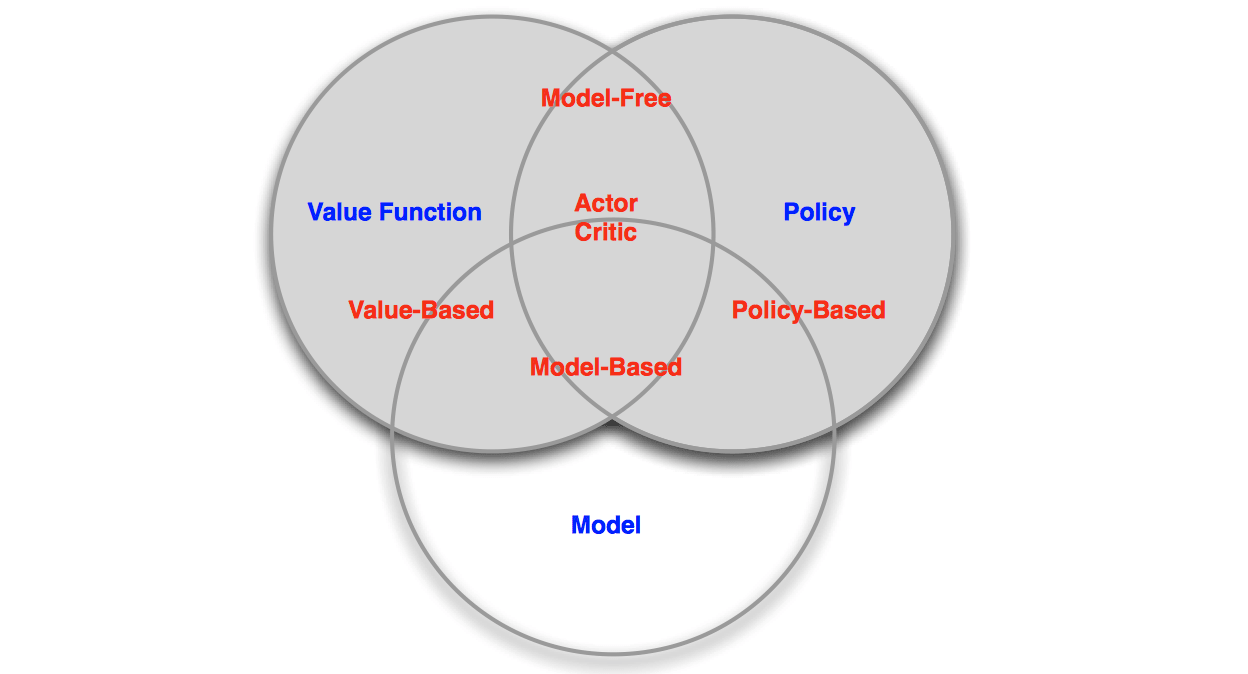
Reinforcement Learning is one of the three major branches of Machine Learning, and is also the intersect of many different disciplines, as the following two figure illustrated.
There are several reasons that makes reinforcement learning different from other machine learning paradigms:
- There is no supervisor, only a reward signal
- Feedback is delayed, not instantaneous
- Time really matters (sequential, non i.i.d data)
- Agent's actions affect the subsequent data it receives
There are some examples of Reinforcement Learning:
- Fly stunt manoeuvres in a helicopter
- Defeat the world champion at Backgammon
- Manage an investment portfolio
- Control a power station
- Make a humanoid robot walk
- Play many different Atari games better than humans
The Reinforcement Learning Problem
Rewards
We say RL do not have a supervisor, just a reward signal. Then what is reward ?
- A reward \(R_t\) is a scalar feedback signal
- Indicates how well agent is doing at step \(t\)
- The agent's job is to maximise cumulative reward
Reinforcement Learning is based on the reward hypothesis, which is
Definition of reward hypothesis
All goals can be described by the maximisation of expected cumulative reward.
There are some examples of rewards :
- Fly stunt manoeuvres in a helicopter
- +ve reward for following desired trajectory
- −ve reward for crashing
- Defeat the world champion at Backgammon
- +/−ve reward for winning/losing a game
- Manage an investment portfolio
- +ve reward for each $ in bank
- Control a power station
- +ve reward for producing power
- −ve reward for exceeding safety thresholds
- Make a humanoid robot walk
- +ve reward for forward motion
- −ve reward for falling over
- Play many different Atari games better than humans
- +/−ve reward for increasing/decreasing score
Sequential Decision Making
So, according to the reward hypothesis, our goal is to select actions to maximise total future reward. Actions may have long term consequences as well as reward may be delayed. It may be better to sacrifice immediate reward to gain more long-term reward. For instance, a financial investment may take months to mature and a helicopter might prevent a crash in several hours.
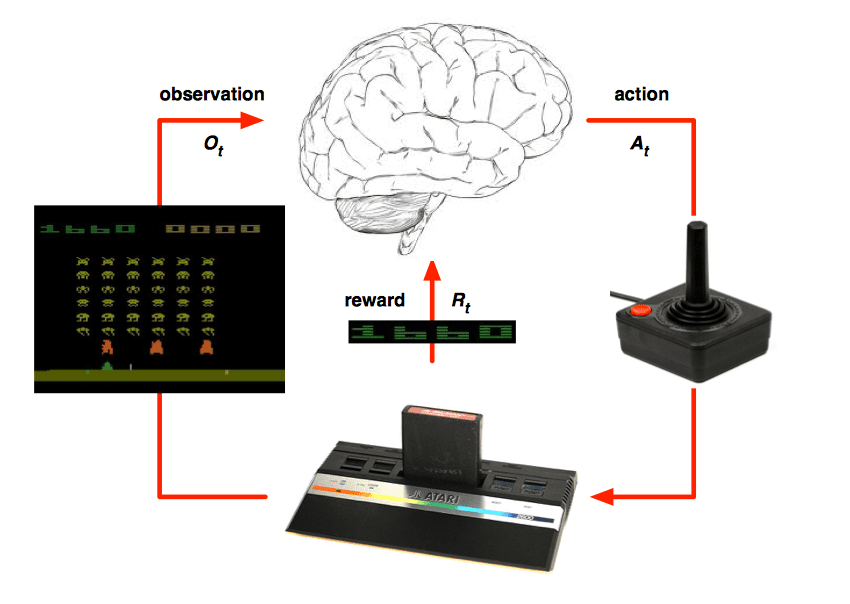
Agent and Environment
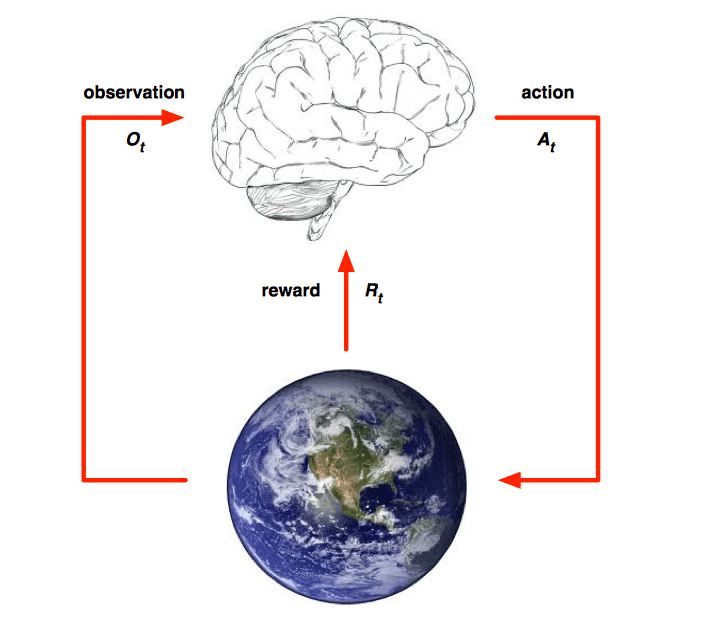
Agents and envrionments are big concepts in RL. They have following relationships:
- At each step \(t\) the agent:
- Excutes action \(A_t\)
- Receives observation \(O_t\)
- Receives scalar reward \(R_t\)
- The environment:
- Receives action \(A_t\)
- Emits observation \(O_{t+1}\)
- Emits scalar reward \(R_{t+1}\)
- \(t\) increments at env. step
State
History and State
The history is the sequence of observations, actions, rewards: \[ H_t = O_1, R_1, A_1, ..., A_{t-1}, O_t, R_t \] which means all observable variables up to time \(t\), i.e. the sensorimotor stream of a robot or embodied agent.
What happens next depends on the history:
- The agent selects actions
- The environments select observations/rewards
State is the information used to determine what happens next. Formally, state is a function of the history: \[ S_t = f(H_t) \] Environment State
The environment state \(S^e_t\) is the environment's private representation, i.e. whatever data the environment uses to pick the next observation /reward. The environment state is not usually visible to the agent. Even if \(S^e_t\) is visible, it may contain irrelevant information.
Agent State
The agent state \(S^a_t\) is the agent's internal representation, i.e. whatever information the agent uses to pick the next action. It is the information used by reinforcement learning algotithms. It can be any function of history: \[ S^a_t=f(H_t) \] Information State
An information state (a.k.a. Markov state) contains all useful information from the history.
Definition
A state \(S_t\) is Markov if and only if \[ P[S_{t+1}|S_t]=P[S_{t+1}|S_1,...,S_t] \]
The above formular means:
"The future is independent of the past given the present" \[ H_{1:t}\rightarrow S_t\rightarrow H_{t+1:\infty} \]
Once the state is known, the history may be thrown away.
The state is a sufficient statistic of the future
The environment state \(S^e_t\) is Markov
The history \(H_t\) is Markov
Rat Example
Here is an example to explain what is state, imagine you are a rat and your master would decide whether to excuted you or give you a pice of cheese. The master makes decisions according to a sequence of signals, the first two sequence and the result are shown in the figure below:
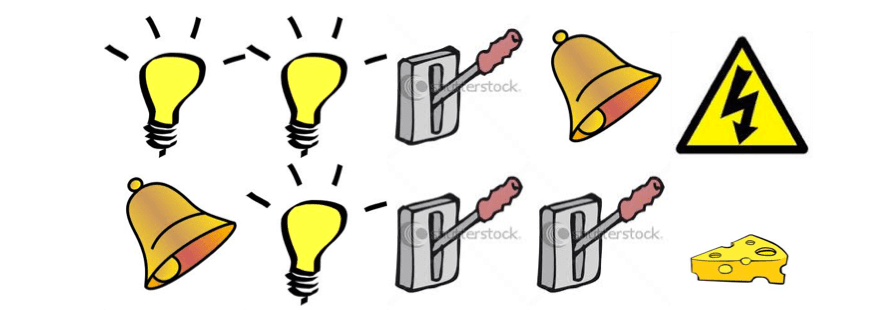
The question is, what would you get if the sequence is like below:

Well, the answer you may give is decided by what is your agent state:
- If agent state = last 3 items in sequence, then the answer would be being excuted.
- If agent state = counters for lights, bells and levers, then the answer would be given a piece of cheese.
- What if agent state = complete sequence?
Fully Observable Environments
Full observability: agent directly observes environment state: \[ O_t = S^a_t=S^e_t \]
- Agent state = environment state = information state
- Formally, this is a Markov decision process (MDP)
Partially Observable Environments
Partial observability: agent indirectly observes environment:
- A robot with camera vision isn't told its absolute location
- A trading agent only observes current prices
- A poker playing agent only observes public cards
With partial observability, agent state ≠ environment state, formally this is a partially observable Markov decision process (POMDP).
In this situation, agent must construct its own state representation \(S^a_t\), e.g.
- Complete history: \(S^a_t = H_t\)
- Beliefs of environment state: \(S_t^a = (P[S^e_t=s^1], …, P[S^e_t=s^n])\)
- Recurrent neural network: \(S^a_t=\sigma(S^a_{t-1}W_s+O_tW_o)\)
Inside An RL Agent
There are three major components of an RL agent, actually, an agent may include one or more of these:
- Policy: agent's behaviour function
- Value function:how good is each state and/or action
- Model:agent's representation of the environment
Policy
A Policy is the agent's behaviour, it is a map from state to action, e.g.
- Deterministic policy:\(a = \pi(s)\)
- Stochastic policy: \(\pi(a|s)=P[A_t=a|S_t=s]\)
Value Function
Value function is a prediction of future reward, it is used to evaluate the goodness/badness of states. And therefore to select between actions: \[ v_\pi(s)=E_\pi[R_{t+1}+\gamma R_{t+2}+\gamma^2R_{t+3}+...|S_t=s] \] Model
A model predicts what the environment will do next, denoted by \(P\) which predicts the next state and by \(R\) predicts the next (immediate) reward: \[ P^a_{ss'}=P[S_{t+1}=s'|S_t=s,A_t=a] \]
\[ R^a_s=E[R_{t+1}|S_t=s, A_t=a] \]
Maze Example
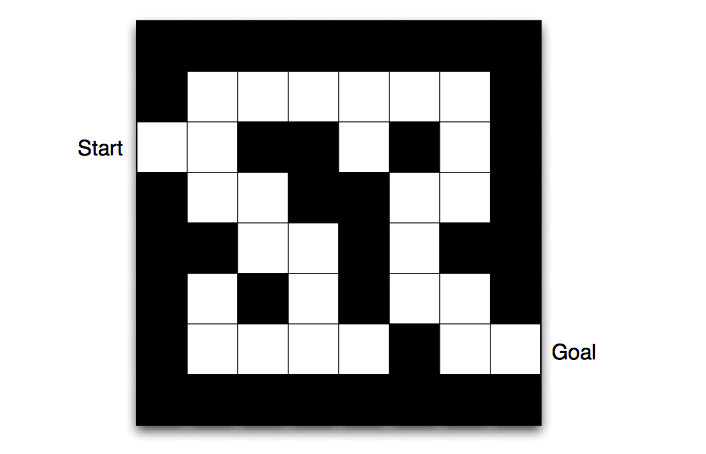
Let an RL agent to solve the maze, the parameters are:
- Rewards: -1 per time-step
- Actions: N, E, S, W
- States: Agent's location
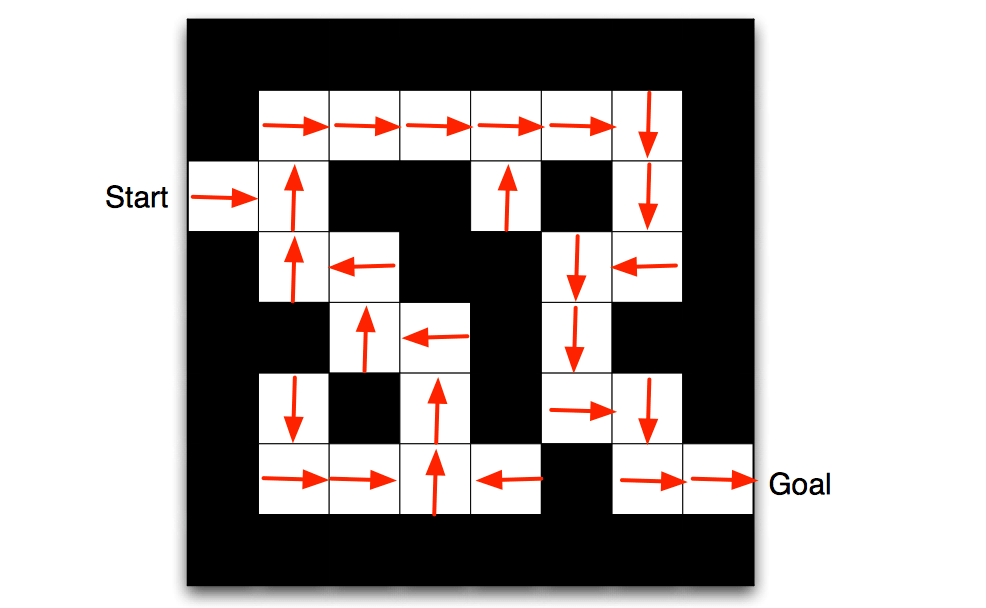
Then the policy map would be (arrows represent policy \(\pi(s)\) for each state \(s\)):
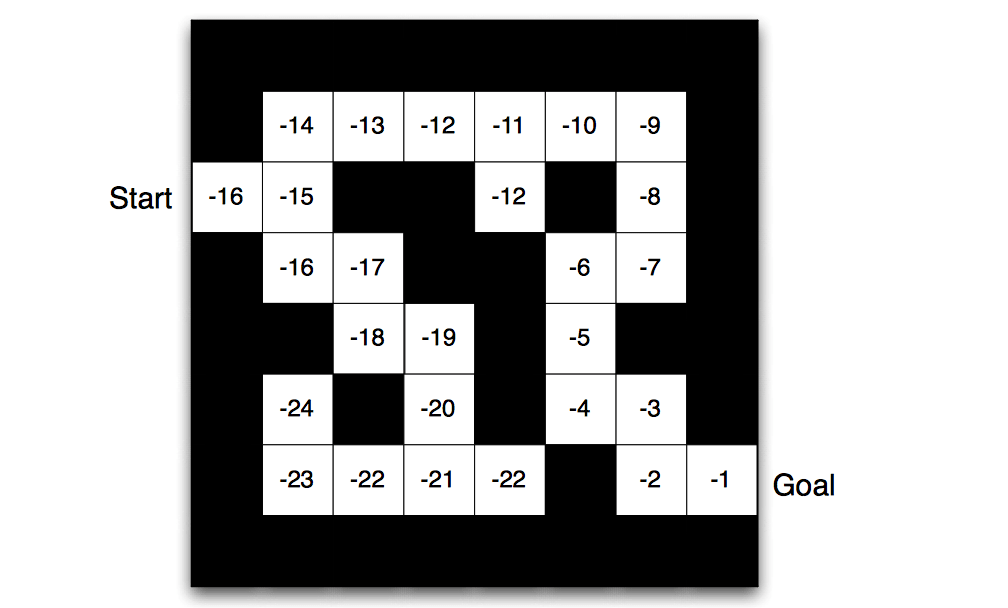
And the value function at each state would be (numbers represent value \(v_\pi(s)\) of each state \(s\)):
Model could be visualize as following:
- Grid layout represents transition model \(P^a_{ss'}\)
- Numbers represent immediate reward \(R^a_s\) from each state \(s\) (same for all \(a\))
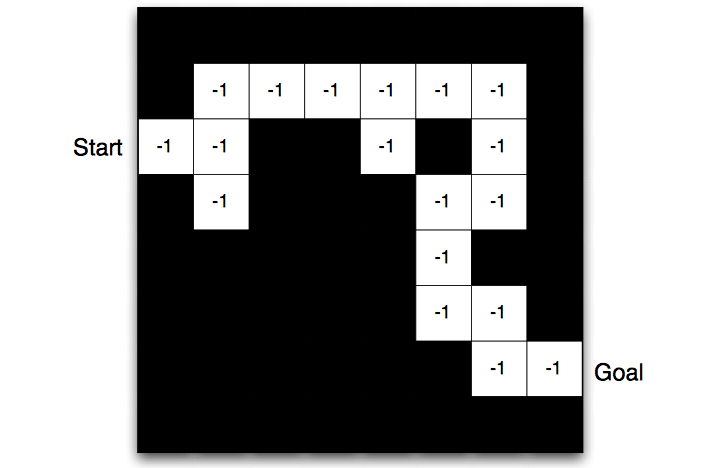
- Agent may have an internal model of the environment
- Dynamics: how actions change the state
- Rewards: how much reward from each state
- The model may be imperfect
Categorizing RL agents
RL agents could be categorized into several categories:
- Value Based
- No Policy (Implicit)
- Value Function
- Policy Based
- Policy
- No Value Function
- Actor Critic
- Policy
- Value Function
- Model Free
- Policy and/or Value Function
- No Model
- Model Based
- Policy and/or Value Function
- Model
Problems within Reinforcement Learning
This section only proposes questions without providing the solutions.
Learning and Planning
Two fundamental problems in sequential decision making:
- Reinforcement Learning
- The environment is initially unknown
- The agent interacts with the environment
- The agent improves its policy
- Planning:
- A model of the environment is known
- The agent performs computations with its model (without any external interaction)
- The agent improves its policy a.k.a. deliberation, reasoning, introspection, pondering, thought, search
Atari Example: Reinforcement Learning
In atari games, rules of the game are unknown, the agent learns directly from interactive game-play by picking actions on joystick and seeing pixels and scores.
Atari Example: Planning
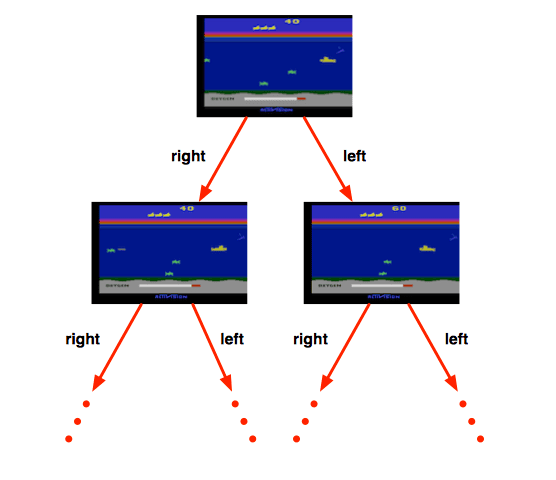
In such case, rules of the game are known, which means the agent could query the emulator as known as a perfect model inside agent's brain. Agents need plan ahead to find optimal policy, e.g. tree search.
Exploration and Exploitation
- Reinforcement learning is like trial-and-error learning
- The agent should discover a good policy
- From its experiences of the environment
- Without losing too much reward along the way
- Exploration finds more information about the environment
- Exploitation exploits known information to maximise reward
- It is usually important to explore as well as exploit
Examples
- Restaurant Selection
- Exploitation Go to your favourite restaurant
- Exploration Try a new restaurant
- Online Banner Advertisements
- Exploitation Show the most successful advert
- Exploration Show a different advert
- Game Playing
- Exploitation Play the move you believe is best
- Exploration Play an experimental move
Prediction and Control
Prediction: evaluate the future
- Given a policy
Control: optimise the future
- Find the best policy
End. Next note will introduce the Markov Decision Processes.